
В описаниях роботов-гуманоидов постоянно встречаются два термина: «актуаторы» и «степени свободы». Без понимания этих понятий новости робототехники — просто набор цифр. Разберём оба.
Актуаторы — моторы суставов робота
Актуатор (от англ. actuator — «приводящий в действие») — это устройство, которое преобразует энергию в физическое движение. Проще говоря, это мотор, который заставляет робота двигаться.
У человека роль актуаторов выполняют мышцы: мозг отправляет сигнал, мышца сокращается, рука поднимается. У робота всё аналогично: компьютер отправляет команду, актуатор вращает сустав, конечность двигается.
Актуаторы бывают разных типов:
Электрические — самые распространённые. Используют электромоторы. Точные, относительно недорогие, легко управляются. Стоят в большинстве современных гуманоидов: Tesla Optimus, Unitree G1, Figure 02.
Гидравлические — используют давление жидкости. Очень мощные, но тяжёлые и сложные в обслуживании. Стояли в старом Atlas от Boston Dynamics. Новый электрический Atlas от них отказался.
Пневматические — используют сжатый воздух. Мягкие и безопасные при контакте с человеком, но менее точные. Применяются в экспериментальных мягких роботах.
Почему актуаторы — это важно: они составляют примерно половину стоимости гуманоида. Когда мы говорим, что роботы подешевели в 200 раз за декаду — это во многом заслуга удешевления актуаторов, особенно в Китае. Качество и цена актуаторов определяют, насколько сильным, быстрым и точным будет робот.
Степени свободы — сколько движений может сделать робот
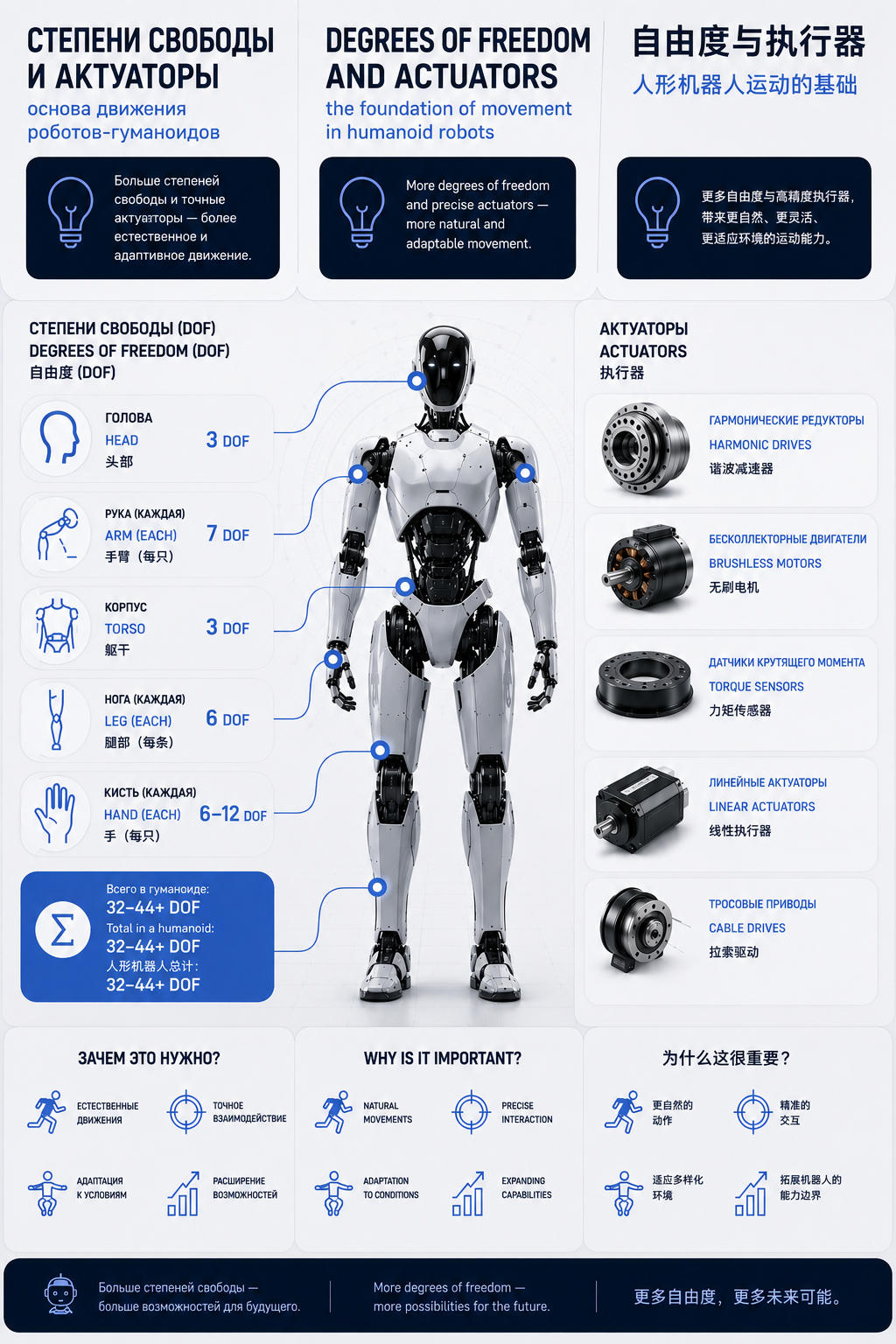
Степень свободы (англ. Degree of Freedom, сокращённо DOF) — это одно независимое движение, которое может совершить сустав робота. Чем больше степеней свободы — тем более гибким и «человечным» выглядит робот.
Простой пример: дверная петля позволяет двери только открываться и закрываться — это 1 степень свободы. Ваше плечо позволяет руке двигаться вверх-вниз, вперёд-назад и вращаться — это 3 степени свободы. Если добавить локоть (1 DOF), запястье (2-3 DOF) и пальцы (до 4 DOF на каждый) — получается рука с 20+ степенями свободы.
Для сравнения — сколько DOF у разных роботов:
Unitree G1 — до 43 DOF (всё тело)
UBTECH Walker S2 — 52 DOF
Kepler Forerunner K2 — 52 DOF (до 11 на каждую кисть)
Boston Dynamics Atlas — 56 DOF
Fourier GR-2 — 53 DOF
Человек — около 244 DOF (включая позвоночник, пальцы рук и ног, челюсть, глаза)
Роботы пока далеки от человеческой гибкости, но прогресс быстрый: ещё пять лет назад 30 DOF считались впечатляющим показателем, сегодня 50+ — норма для серьёзного гуманоида.
Как эти понятия связаны
Каждая степень свободы требует своего актуатора (или нескольких). Робот с 52 степенями свободы имеет минимум 52 актуатора. Больше DOF = больше актуаторов = выше стоимость = сложнее управление. Именно поэтому инженеры ищут баланс: достаточно DOF для выполнения задачи, но не больше, чем необходимо.
Промышленному роботу на складе не нужны 50 DOF — ему хватит 15-20. А роботу, который должен завязывать шнурки или вставлять штекер в розетку, нужны десятки степеней свободы только в кистях рук.
Запомнить просто
Актуаторы = мышцы робота. Определяют силу и скорость. Степени свободы = суставы робота. Определяют гибкость и диапазон движений.
Теперь, когда в описании робота вы видите «52 DOF» или «высокомоментные актуаторы» — вы знаете, о чём речь.