
在每一篇关于人形机器人的报道中,都会反复出现两个术语:”执行器”和”自由度”。如果不理解这两个概念,机器人新闻就只是一堆数字。让我们逐一解析。
执行器——机器人的肌肉
执行器(英文:actuator)是将能量转化为物理运动的装置。简单来说,就是让机器人动起来的电机。
在人体中,肌肉扮演着执行器的角色:大脑发出信号,肌肉收缩,手臂抬起。机器人的工作原理完全一样:计算机发出指令,执行器转动关节,肢体随之运动。
执行器主要分为几种类型:
电动执行器——最常见的类型。使用电动马达驱动,精度高、成本相对较低、易于控制。大多数现代人形机器人都采用这种方案:Tesla Optimus、宇树G1、Figure 02。
液压执行器——利用液体压力驱动。力量极大,但笨重且维护复杂。早期波士顿动力Atlas使用液压驱动,而新一代电动Atlas已经放弃了这种方案。
气动执行器——利用压缩空气驱动。柔软安全,适合与人接触,但精度较低。主要用于实验性的软体机器人。
为什么执行器如此重要: 执行器约占人形机器人总成本的一半。当我们说机器人在十年内降价了200倍——很大程度上归功于执行器的降价,尤其是中国制造商带来的规模效应。执行器的质量和价格决定了机器人的力量、速度和精度。
自由度——机器人能做多少种动作
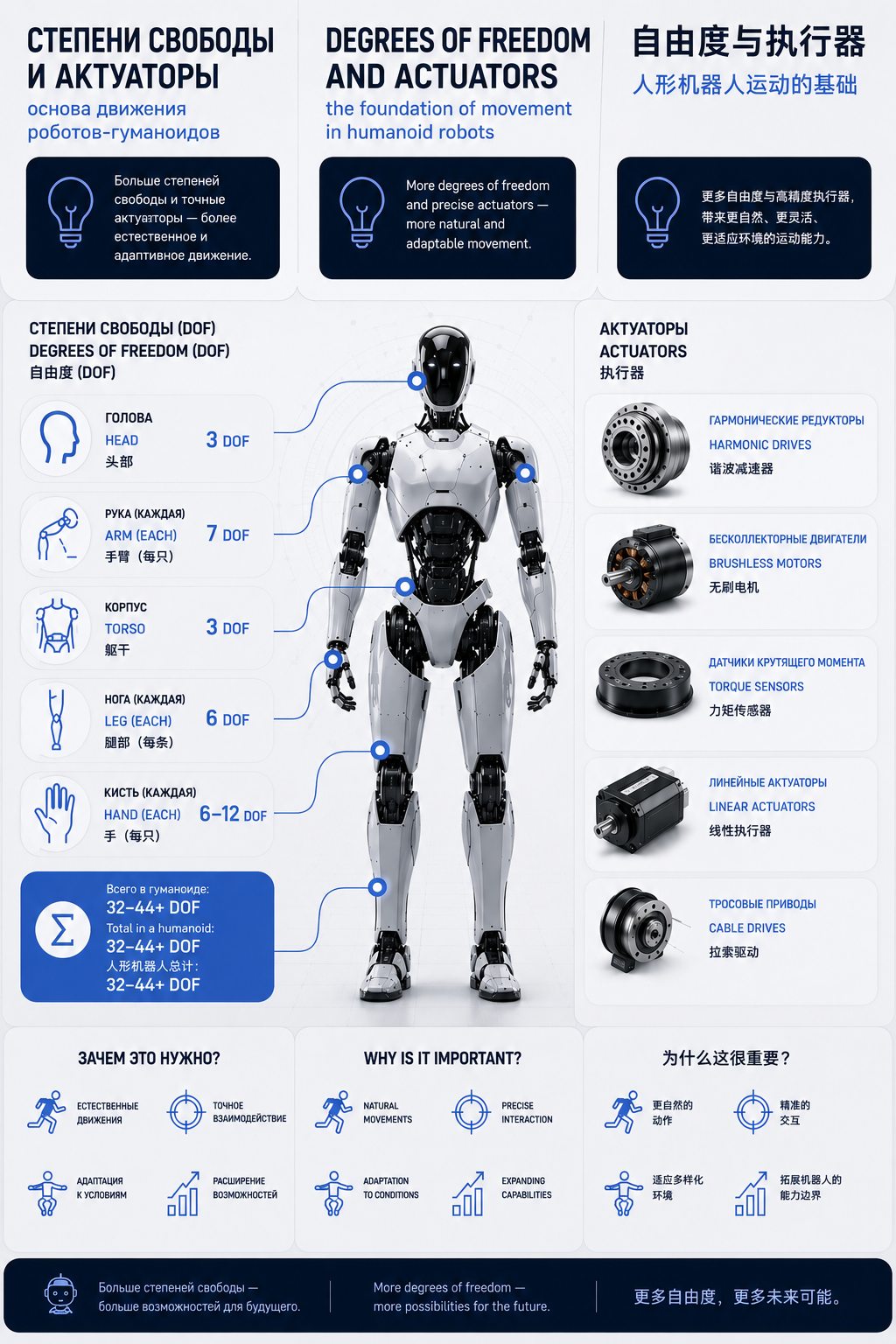
自由度(英文:Degree of Freedom,缩写DOF)是指机器人关节能够进行的一个独立运动。自由度越多,机器人就越灵活,看起来越”像人”。
举个简单的例子:门铰链只允许门开关——这是1个自由度。你的肩膀可以让手臂上下、前后移动和旋转——这是3个自由度。再加上肘关节(1 DOF)、手腕(2-3 DOF)和手指(每根最多4 DOF)——一只手就有20多个自由度。
不同机器人的自由度对比:
宇树 G1 — 最多43个自由度(全身)
优必选 Walker S2 — 52个自由度
开普勒 Forerunner K2 — 52个自由度(每只手最多11个)
波士顿动力 Atlas — 56个自由度
傅利叶 GR-2 — 53个自由度
人类 — 约244个自由度(包括脊柱、手指、脚趾、下巴、眼球)
机器人的灵活性仍远不及人类,但进步飞速:五年前30个自由度就被认为很了不起,如今50个以上已成为高端人形机器人的标配。
两个概念如何关联
每一个自由度都需要至少一个执行器来驱动。一个拥有52个自由度的机器人至少有52个执行器。更多的自由度 = 更多的执行器 = 更高的成本 = 更复杂的控制。这就是为什么工程师们需要寻找平衡:满足任务需求的自由度数量,但不超出必要范围。
仓库机器人不需要50个自由度——15-20个就足够了。但如果机器人需要系鞋带或将插头插入插座,仅双手就需要数十个自由度。
简单记忆法
执行器 = 机器人的肌肉,决定力量和速度。 自由度 = 机器人的关节,决定灵活性和运动范围。
现在,当你看到机器人参数中的”52 DOF”或”高扭矩执行器”时——你就知道是什么意思了。